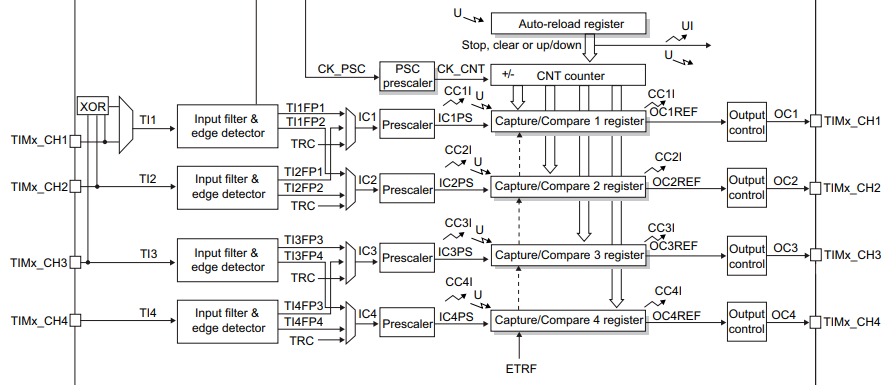
برای اینکه از حالت Input capture در میکروکنترلرهای STM32 استفاده کنیم و فرکانس یک سیگنال ورودی را اندازه بگیریم، ابتدا باید این سیگنال را به یکی از کانالهای ورودی واحد تایمر متصل کنیم. همانطور که از تصویر بالا مشاهده میکنید، در مسیر این سیگنال بلوکهای فیلتر دیجیتال، تشخیص لبه و Prescaler قرار دارد.
برای سادگی کار، ما از فیلتر دیجیتال و Prescaler استفاده نخواهیم کرد اما تشخیص لبه یا همان Edge detector را در حالت لبهی بالارونده قرار میدهیم تا با هر لبهی بالارونده یک وقفه رخ بدهد.
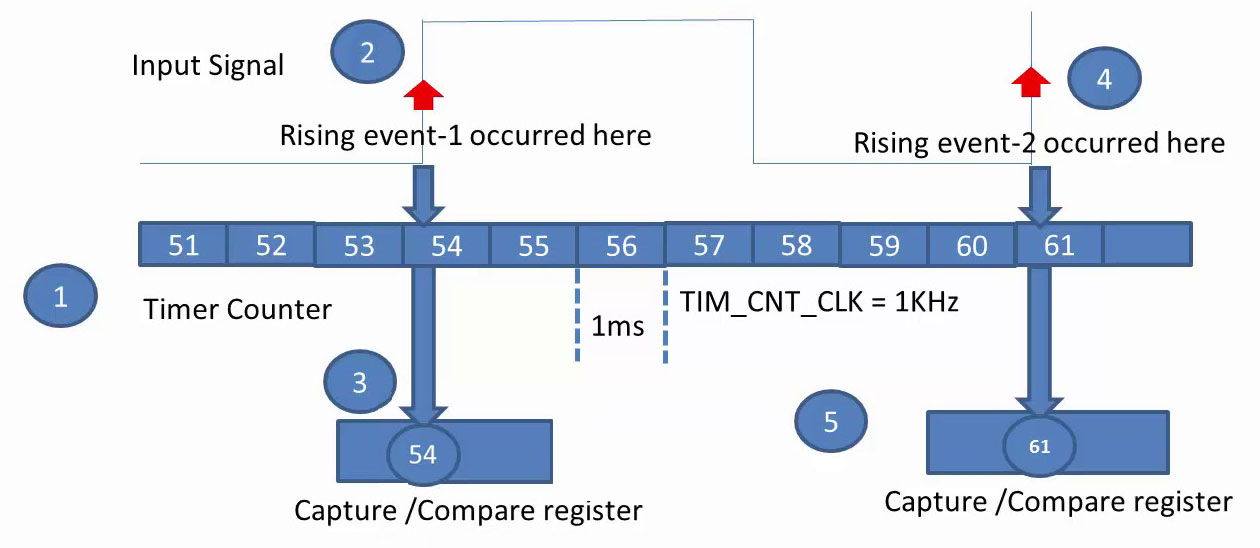
با اعمال تنظیمات بالا، در هر لبهی بالاروندهی سیگنال ورودی یک وقفه رخ خواهد داد و محتوای رجیستر شمارنده به رجیستر Capture منتقل خواهد شد.
نکتهای که بسیار مهم است و باید به آن توجه ویژه کرد، نقش فرکانس کلاک شمارنده و همچنین مقدار Auto-reload register است. در واقع با توجه به محدودهی فرکانس سیگنال ورودی، باید فرکانس کلاک شمارنده و مقدار Auto-reload register را به نحوی انتخاب کنیم که از صحت فرکانس محاسبه شده مطمئن باشیم.
اجازه بدهید کمی بیشتر در این رابطه توضیح بدهم تا مسئله از حالت گنگ بودن خارج شود.
خب همانطور که گفتیم برای محاسبهی فرکانس سیگنال ورودی، نیاز است که مقدار شمارنده در دو لبهی بالاروندهی متوالی را داشته باشیم. از جهتی شمارندهی تایمر در میکروکنترلرهای STM32 با توجه به تنظیماتی که ما اعمال کردیم از 0 تا مقدار Auto-reload register شروع به شمارش میکند که بیشترین مقدار این رجیستر با توجه به 16 بیتی بودن آن برابر با 65535 است. پس از اینکه شمارنده به مقدار Auto-reload register رسید یک سرریز رخ میدهد و دوباره از 0 شروع به شمارش میکند.
با توجه به بازه 0 تا 65535 رجیستر Auto-reload، در زمان شمارش ممکن است چندین حالت مختلف رخ بدهد که در ادامه به تفصیل هر حالت را بررسی خواهیم کرد.
حالت اول:
اگر دو وقفهی مربوط به دو لبهی بالاروندهی متوالی، زمانی رخ بدهد که هنوز هیچ سرریزی اتفاق نیفتاده باشد، هیچ مشکلی وجود ندارد و ما میتوانیم به درستی و بدون هیچ خطایی مقدار فرکانس سیگنال ورودی را محاسبه کنیم. مثلا فرض کنید وقفهی اول زمانی رخ بدهد که مقدار شمارنده 500 و وقفهی دوم زمانی رخ بدهد که مقدار شمارنده 1000 است.
حالت دوم:
اگر وقفهی اول قبل از سرریز، و وقفهی دوم بعد از سرریز رخ بدهد. در این حالت هم میتوان با یک تکنیک ساده که در ادامه، هنگام نوشتن کد خواهیم گفت، به درستی و بدون هیچ خطایی اختلاف بین دو مقدار و به دنبال آن مقدار فرکانس سیگنال ورودی را محاسبه کنیم. مثلا فرض کنید وقفهی اول زمانی رخ بدهد که مقدار شمارنده 40000 و وقفهی دوم زمانی رخ بدهد که شمارنده سرریز کرده است و به مقدار 2000 رسیده است.
البته در این حالت اگر وقفهی دوم بعد از سرریز رخ بدهد و همچنین مقدار شمارنده در لحظهی وقوع این وقفه، از مقدار شمارنده در لحظهی وقوع وقفهی اول بیشتر باشد، میتوان گفت که این حالت یک حالت جدید است. اما ما این حالت را یک زیر حالت از حالت دوم در نظر گرفتیم.
تنها فرقی که بین این دو زیر حالت وجود دارد، این است که در زیر حالت اول، عدد پس از سرریز از عدد قبل سرریز کوچکتر، اما در زیر حالت دوم، عدد پس از سرریز از عدد قبل سرریز بزرگتر است.
همین مثال بالا را در نظر بگیرید که شمارنده ابتدا 40000 بود و پس از سرریز به مقدار 2000 رسید. در زیر حالت دوم فرض کنید به جای 2000 به عدد 50000 برسد.
کدی که ما در ادامه خواهیم نوشت زیر حالت اول را پوشش خواهد داد، به عنوان یک چالش نوشتن کدی که زیر حالت دوم را پوشش بدهد به خودتان واگذار میشود.
حالت سوم:
حالتی که برای ما مشکل ایجاد میکند و باعث میشود که نتوانیم اختلاف بین دو مقدار را به درستی محاسبه کنیم، حالتی است که بیش از یک بار سرریز رخ بدهد. مثلا فرض کنید وقفهی اول زمانی رخ بدهد که مقدار شمارنده 6000 و وقفهی دوم زمانی رخ بدهد که شمارنده دو بار یا بیشتر سرریز کرده است و شمارنده به مقدار 3000 رسیده است.
البته در این حالت هم با یک راهکار بسیار ساده میتوانید فرکانس سیگنال ورودی را به درستی محاسبه کنید. این مورد هم به عنوان چالش دوم به خودتان واگذار میشود.
در بالا تمامی حالات مختلف Input capture در میکروکنترلرهای STM32 بیان شد و سعی کردم که این موضوع را بسیار ساده و روان شرح بدهم. اما اگر هنوز جایی برایتان گنگ است و ممکن توضیحات کافی نباشد در زیر همین پست سوالاتتان را بپرسید.
از میان تمامی حالات بالا، احتمال اینکه در طول زمان، فقط حالت اول رخ بدهد بسیار کم است (توجه کنید که میگوییم احتمال اینکه فقط حالت یک رخ بدهد کم است، نه اینکه حالت یک اصلا ندهد.) و اگر با توجه به محدودهی فرکانس سیگنال ورودی، فرکانس کلاک شمارنده و مقدار Auto-reload را به نحوی تنظیم کنیم که فقط یک بار سرریز رخ بدهد، حالت سوم هم اتفاق نمیافتد.
پس با این تفاسیر نیاز است که ما کدی بنویسیم که حالت اول و دوم را پوشش بدهد.
ما در ادامه میخواهیم یک سیگنال با فرکانس 976Hz را به کانال 1 متصل کنیم و فرکانس آن را اندازه بگیریم. اجازه بدهید به نرمافزار برویم و ادامه توضیحات را آنجا بیان کنیم.
ابتدا تنظیمات را مانند تصویر زیر انجام میدهیم:




سلام با تشکر از مطالب مفیدتون . لطفا جلسات بعدی رو هم ادامه دهید . و اینکه از dma هم استفاده کنید ممنون
سلام حسین، سپاس از نظر مثبتتان. کمی درگیر کارها هستم، حتما این مجموعه را کامل میکنم. DMA را هم در یک قسمت به صورت کامل شرح خواهم داد.
سلام دمت گرم خیلی عالی بود امیدوارم بقیه مطالب زودتر بذارید رو سایت،pwm کی آماده میشه؟
سلام مجید، سپاس از نظر مثبتتون. دوست داشتم هرچه سریعتر این مجموعه را کامل کنم، اما درگیر یک پروژه خیلی سنگین شدم، متاسفانه در حال حاضر وقت خالی نیست. سعیام را میکنم زودتر بیام و تمامش کنم.
Such a WoW
سپاس از شما. 😉
سلام. مشتاقانه منتظر ادامش هستم
سلام امیرحسین.
بله، حتما ادامش را در وقت مناسب ارائه خواهم داد.
سلام. مقالاتتون واقعا عالیه. ایا ادامه هم داره؟
سلام امیرعلی. سپاس از شما. بله، مقالات ادامه خواهد داشت.