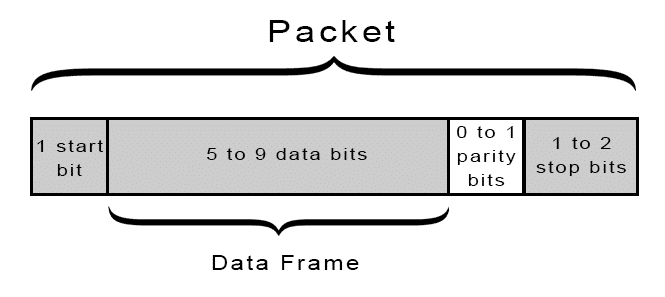
در تصویر بالا یک پکت دیتا نشان داده شده است که این پکت دارای جزئیاتی به شرح زیر است:
Start bit: این بیت از پکت که مقدار آن صفر منطقی است نشاندهندهی شروع ارسال پکت است و به گیرنده خبر میدهد که ارسال پکت شروع شده است.
Data Frame: پس از اینکه Start bit ارسال شد نوبت این است که دیتای موردنظر ما به سمت گیرنده ارسال شود. دیتا میتواند متشکل از 5 تا 9 بیت باشد اما بیشتر از 8 یا 9 بیت استفاده میشود.
Parity bit: بیت پریتی یا معادل آن در زبان فارسی توازن، معیاری برای سنجش خطا است. این بیت اختیاری است، یعنی پکت هم میتواند شامل بیت پریتی باشد و هم نه. مقدار بیت پریتی در فرستنده و گیرنده محاسبه و با هم مقایسه میشوند، اگر مقدار این بیت در سمت فرستنده و گیرنده برابر نبودند یعنی اینکه خطایی رخ داده است و دیتای دریافتی صحیح نمیباشد.
یک توضیح مختصر در رابطه با بیت پریتی میدهم برای جزئیات بیشتر میتوانید به مراجع مربوطه مراجعه کنید. دو نوع پریتی یعنی پریتی زوج و پریتی فرد وجود دارد.
در پریتی زوج همهی بیتهای Data Frame با هم XOR میشوند تا اگر تعداد 1های بیتهای Data Frame فرد بود، بیت پریتی یک منطقی شود و اگر تعداد 1های بیتهای Data Frame زوج بود، بیت پریتی صفر منطقی شود تا تعداد 1های مجموع بیتهای Data Frame و بیت پریتی زوج باشد.
در پریتی فرد همهی بیتهای Data Frame با هم XNOR میشوند تا اگر تعداد 1های بیتهای Data Frame فرد بود، بیت پریتی صفر منطقی شود و اگر تعداد 1های بیتهای Data Frame زوج بود، بیت پریتی یک منطقی شود تا تعداد 1های مجموع بیتهای Data Frame و بیت پریتی فرد باشد.
Stop bit: این بیت از پکت که مقدار آن یک منطقی است نشاندهندهی پایان ارسال پکت است و به گیرنده خبر میدهد که ارسال پکت به پایان رسیده است. البته همانطور که از تصویر مشخص است بیت پایان میتواند از 1 به 2 بیت نیز افزایش یابد.
خب ما تا اینجا جزئیات یک پکت در پروتکل UART را بررسی کردیم و گفتیم که هر جز از پکت چه کاربردی دارد. اما هنوز یک عامل مهم در این پروتکل را بررسی نکردیم و آن عامل هم چیزی نیست جز Baud rate.
Baud rate در واقع مشخص میکند که در یک ثانیه چند بیت دیتا منتقل میشود. اگر به خاطر داشته باشیم در ابتدای مقاله گفتیم عاملی که باعث کار و هماهنگی مدارات سنکرون میشود کلاک است ولی در مدارت آسنکرون که کلاکی وجود ندارد یک پارامتر دیگر این کار را انجام میدهد که آن پارامتر همین Baud rate است.
در فریم دیتا وقتی ما یک بیت را ارسال میکنیم بسیار مهم است که ارسال این بیت چه مقدار زمانی طول میکشد. در واقع Baud rate است که این مقدار زمان را مشخص میکند.
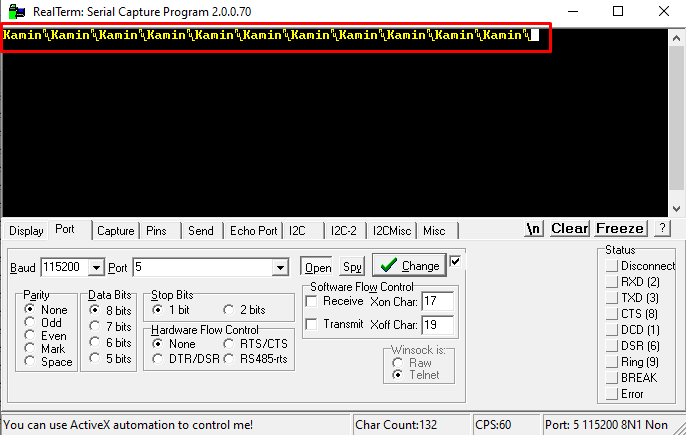
مقدار Baud rateهای متفاوت و زیادی در این پروتکل بنا به سرعت و کاربرد مورد نیاز ما وجود دارد اما معمولا از دو سرعت 9600 و 115200 استفاده میشود.
پروتکل UART در میکروکنترلرهای STM32
در میکروکنترلرهای STM32 علاوه بر اینکه تمامی مواردی که در رابطه با پروتکل UART بررسی کردیم، پشتیبانی میشود، موارد جانبی دیگری نیز به همراه این پروتکل ارائه شده است که در داکیومنتهای شرکت ST این موارد جانبی را جز قابلیتهای مهم این دسته از میکروکنترلرها به حساب آورده است.
اما هر کدام از این موارد جانبی باید به صورت جداگانه توضیح داده شوند و راهاندازی شوند و از حوصلهی این مقاله خارج است. پس ما در این مقاله قصد داریم که فقط پروتکل UART را در حالت ارسال دیتا راهاندازی کنیم.
خب اجازه بدهید که به نرمافزار STM32CubeMX برویم تا UART را در حالت ارسال داده راهاندازی کنیم.
ابتدا کلاک و دیباگ را مانند گذشته تنظیم میکنیم و سپس از بخش Connectivity که مربوط به پروتکلهای پشتیبانی شده توسط میکروکنترلر است، USART1 را فعال میکنیم.
پس از فعال کردن USART1 میبینم که دو پین مربوط به USART1 به شکل زیر در آمده اند:





با سلام و تشکر از زحمات شما. توضیحات بسیار عالی و کاربردی هست. انچه مطلب را بیشتر جا می اندازد وجود مثالهای متعدد می باشد که امیدوارم در این زمینه هم زحمت انرا متقبل شوید
سلام رضا. سپاس از نظر مثبت شما.
منظورتان را از جمله آخر متوجه نشدم، مثال در همین مقالات یا به صورت جداگانه؟
توابع LL واقعا بهتر از HAL هستند
بله، به نظر منم واقعا خیلی بهتر از توابع HAL هستند.
سلام. با تشکر از شما توضیحات ، کامل بودند.
سلام حمید عزیز، سپاس از نظر مثبتتان. خوشحالم که مطالب برای شما مفید بودند.